Point clouds and drones: Part two
This is a continuation of a previous post, see part one.
During the second half of spring 2022, some of the previous team decided to continue work on our previous solution. We set out with two primary goals
- Reduce the human error while controlling the drone, so as to improve the data we collect from the drone.
- Improve and expand on the post-processing
To reduce the human error of controlling the drone, we implemented some semi-autonomous functionality for controlling the drone. Instead of controlling the drone with the help of the drone’s controller, we use the app, which has been updated with buttons for controlling the drone. The semi-autonomous functionality includes automatically rotating a certain amount, and driving forward one meter.
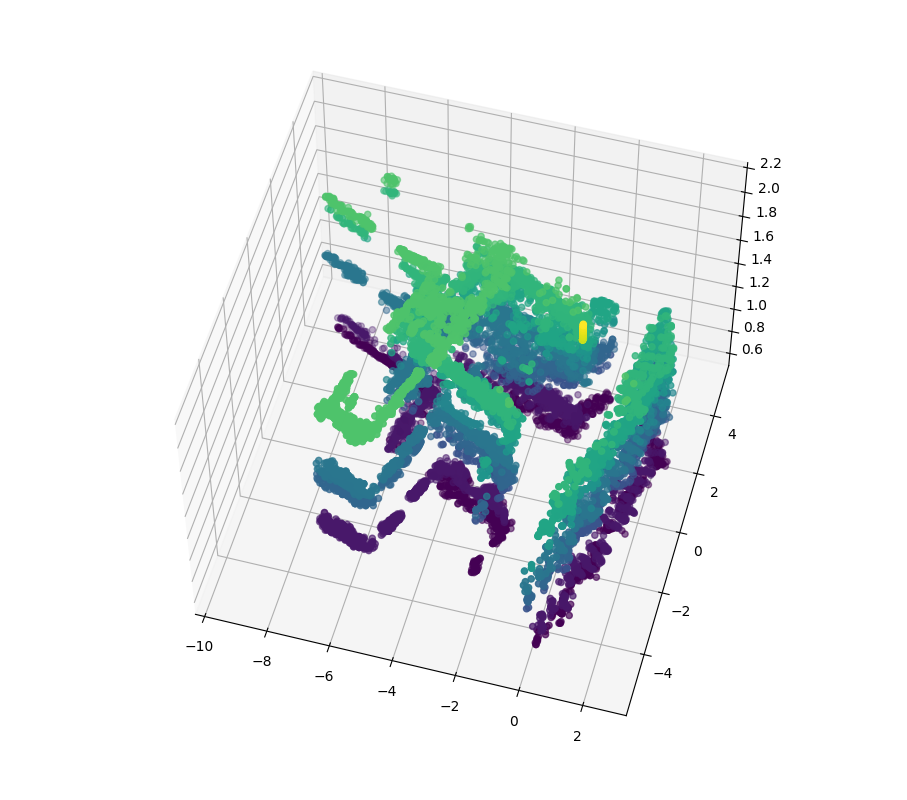
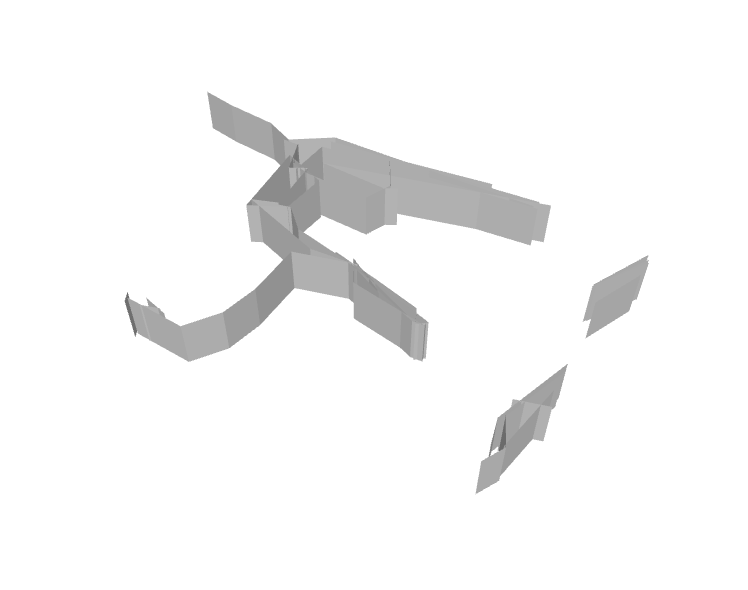
For the post-processing, our aim was to not only decrease the number of outlying points, but to also generate a mesh of the resulting point cloud. By changing the parameters of the statistical outlier removal, we managed to improve post-processing in that regard. For the creation of a mesh, it turned out to be a bit more complex than we thought. Our algorithm is now using a bunch of other algorithms, such as DBSCAN clustering, line conversion, line connection, line decimation, and a home-brewed version of Ramer-Douglas-Peucker’s algorithm.
We sent in a paper for this to a conference in Spain, UCAmI. Fingers crossed we get accepted!
For the results of a mapping and post-processing, see the images below.